

")
")
")
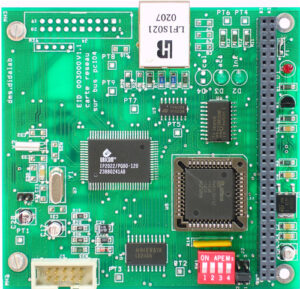
68332 microprocessor/microcontroller – Training board (ref: EID210000)
EID210 → 68332 µprocessor/µcontroller study board, including:
▪ Serial ports: RS232, USB, SPI, I2C.
▪ Parallel port.
▪ Digital-to-Analog Converters (DAC).
▪ Analog-to-Digital Converters (ADC).
▪ “DIDALAB IDE”.
Specifications:
Hardware:
▪ Architecture of a 68332 16/32-bit microsystem (Freescale Semiconductor®), microprocessor-based, microcontroller, clock frequency 16.7 MHz.
▪ RAM 128 Kbytes of 16 bits.
▪ ROM 128 Kbytes « flash ».
▪ Serial port: USB, RS232, SPI, I2C.
▪ PC/104 bus giving access to many available input/output boards.
▪ Parallel port 24 bits.
▪ 6 I & 4 O (analog).
Software:
▪ PC editor.
▪ Cross assembler.
▪ Debugger monitor, stop points, registers state, storage area…
▪ “C” & “C++” cross compiler, GNU with StDIO (Standard Data Input Output) libraries, String (characters string control), Math (floating calculation), low level function library provided (interrupt control, USB & RS232 ports control…), linker specifically configured for the EID 210 000 board.
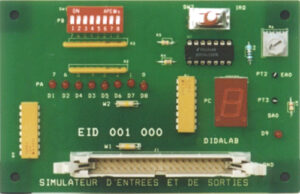
EID001000 input/output simulator:
In order to underscore the inputs/outputs of a micro-system & facilitate the student’s first steps in the study & programming, one input/output simulator is provided. It includes:
▪ ON/OFF inputs (microsystem), 8 microswitches.
▪ ON/OFF outputs (microsystem), 8 LEDs.
▪ Analog input (microsystem), 1 potentiometer.
▪ Analog output (microsystem), 1 LED with test point.
▪ 1x 7-segment display.
▪ 1 push-button with bounce-free logic for the interrupt implementation.
Available documents
You may also like…
Training unit of industrial local networks applied to the car industry.
Linked to one EID110 / EID210 target board or a PC computer with a CAN interface board, the CAN module is a complete development project of car signals system control. Programming is carried out either in assembler, C, or C++ language with one real-time kernel available.
Embedded Web server expansion board, enabling the implementation (through PC/104 standard connection) of a modern system equipped with one embedded Web server, that can be remotely consulted via Internet.

Dynamic real-time kernel for the 68332 (EID210) µcontroller-based target board, enabling the implementation of the real-time kernel on the embedded system.
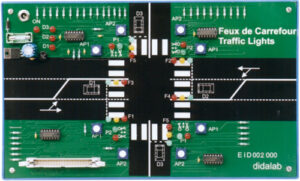
Operative part for the simulation of traffic lights. It can be controlled by the EID 110/210 series training boards.
It represents a road crossing between 1 high traffic road and 1 side road with pedestrian calls & car presence detections.
Training unit of motor speed control (windshield wiper), through LIN CAN network.
Linked to one EID110 / EID210 target board or a PC with CAN interface board, the CAN module is a complete development project on motor speed control. The speed signal is generated by one incremental encoder. Programming is carried out in assembler, C or C++ language. The real time kernel is available.

The Pedagocical Multiplexed Car is the perfect tool to put the student into a development situation in a Design Office.
The system is constituted of 1 built-in computer (based on the 68332 microcontroller) + 1 industrial CAN interface board + 1 CAN board with 8 ON/OFF inputs + 4 CAN boards with 4 power outputs.
1 {C & C++} compiler & many practical works are provided with the equipment.
→ Inputs/Outputs simulator, enabling the implementation of programs using ON/OFF analog inputs/outputs & interrupts.
→ To plug with EID110 or EID210 board(s).

The Training Multiplexed Vehicle (VMD01C) is the perfect tool to put the Student faced to development situation in a Design Office.
The system is constituted of 1 built-in computer (based on the 68332 microcontroller) + 1 industrial CAN interface board + 1 CAN board with 8 ON/OFF inputs + 4 CAN boards with 4 power outputs + 1 windscreen set with wiper motor speed control through CAN network + 1 real-time kernel.
1 {C & C++} compiler & many practical works are provided with the equipment.