
")
")
")
Study of speed/position servo-systems – Training module (ref: ERD050000)
Digital & analog servo-control: ▪ Selection of the structure: open loop, closed loop in speed & position. ▪ Selection of the excitation type: constant step, ramp, trapezoid, sine, internal (or external) Setpoint following (potentiometer). ▪ Selection of the power interface supplying the motor: voltage or current control. ▪ Selection of the corrector: P/PD/PI/PID ; ON/OFF ; Digital (sampled with “Z” correction function(optional)). ▪ Selection of the input onto which the derivative action is applied: gap, measurement. ▪ Selection of the profile of the driven mechanical load: constant (weighty load), function of the speed (viscuous/fluid friction), intrinsic dry friction, compensated or not.
Specifications:
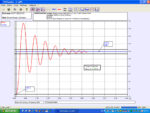
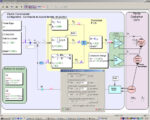
The ERD 050000 electromechanical unit is built in a PVC case. Into this case are located: ▪ 1 mechanical device, including: ▪ 1 DC motor, 24 VDC (characteristics, cf. thereafter) ▪ 1 DC generator, coupled to the motor by OLDHAM joint, enabling the generation of various mechanical loads ▪ 1 graduated disk for displaying the position & behavior of the rotating device ▪ 1 electronic board with high level, power microprocessor, ensuring the system real time control & communication to PC microcomputer ( RS232 serial link or USB) ▪ 1 power electronic board to carry out the motor power interface, as well as the generator interface for the armature current control (simulating various mechanical loads) One program under Windows enables the selection of: ▪ The system structure: open/closed loop, speed or position. ▪ The control type & the characteristic values: constant step, ramp, sine, trapezoid, external. ▪ The corrector: P, PI, PD, PID with parameters adjustments (optional: « Z » corrector, 4th order). ▪ The mechanical load profile: constant torque (weighty load), viscous friction (in a.x), fluid friction (in b.x2). ▪ The time response display of one (or several) characteristic magnitude(s): position, speed, acceleration, motor current/voltage, setpoint, gap, corrector output, etc… ▪ The assistance to the measurement of typical values in automatic control: time constant, overshoot, stabilisation at 5%, harmonic calculation, sinusoidal.
Available documents
You may also like…
Manual of Practical Works, speed & position linear servo control, first level, topics. Including the Experiments to be carried out on the ERD050000 servo system & one Resource file giving all necessary technical basis.

Manuel de Travaux Pratiques asservissement/régulation de vitesse et position dans le domaine numérique, tome sujets, il inclut les sujets de manipulations à effectuer et un dossier ressource à mettre en oeuvre sur le servomécanisme ERD050000 et un dossier ressources.
Manuel de Travaux Pratiques asservissement/régulation de vitesse et position dans le domaine numérique, tome comptes rendus, il inclut les solutions et courbes de réponse réalisées sur le servomécanisme ERD050000.
Manuel de Travaux Pratiques asservissement/régulation de vitesse et position dans le domaine linéaire, niveau BAC+ 2, tome sujets, il inclut les exercices à effectuer sur le servomécanisme ERD050000, et un dossier ressources.
Manual of Practical Works, speed & position linear servo control, Second level, reports. Including the response elements on Experiments carried out on the ERD050000 servo system.

Manual of Practical Works, speed & position linear control, first level, reports. This manual includes the solutions & response curves carried out on the ERD050000 Servo system.