

Coeur logiciel d’asservissement régulation
Le cœur logiciel fonctionne sous Windows, il pilote de nombreux équipements d’automatique, de régulation, d’électronique de puissance.
Il permet :
• Le lancement des essais en temps réel,
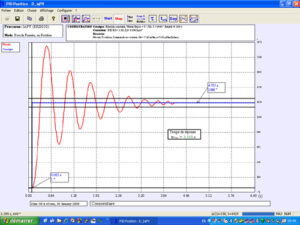
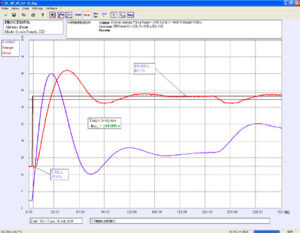
• La récupération des courbes temporelles et fréquentielles,
• La génération de signaux de commande (sinus, carré, triangle…)
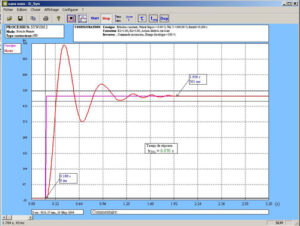
• L’analyse des résultats, constante de temps, dépassement, déphasage…
Une version d’évaluation gratuite  D_CCA_Eval de notre logiciel D_CCA (Contrôle Commande dans le domaine de l’Automatique) est téléchargeable sur notre site. Celle-ci permet au lecteur de découvrir tout le potentiel pédagogique de D_CCA.
D_CCA_Eval de notre logiciel D_CCA (Contrôle Commande dans le domaine de l’Automatique) est téléchargeable sur notre site. Celle-ci permet au lecteur de découvrir tout le potentiel pédagogique de D_CCA.
Caractéristiques :
Il fonctionne sous environnement Windows et permet le pilotage de nombreuses parties opératives.
Il permet à l’utilisateur, via une interface graphique ergonomique, de configurer le système :
• Choix de la structure du système : boucle ouverte / boucle fermée en vitesse ou en position,
• Choix du type de commande et des valeurs caractéristiques : échelon constant, rampe, sinus, profil
trapézoïdal, entrée externe, entrée potentiométrique,
• Choix du correcteur et de ses réglages (P, PI, PID, correcteur en Z, logique floue, retour tachymétrique)
• Choix des paramètres d’acquisition et d’enregistrement,
• Choix des unités (degrés d’angle, radians, tours)
Il permet également un déroulement structuré d’une campagne d’essais expérimentaux :
• Demander la visualisation de la réponse temporelle d’une (ou plusieurs) grandeur(s) caractéristique(s) :
position, vitesse, accélération, courant moteur, tension moteur, consigne, écart, sortie correcteur etc?
• Modifier les échelles du diagramme temporel (zoom en X, en Y)
• Enregistrement de l’essai en cours, comparaison avec les essais précédents.
• Déterminer des valeurs caractéristiques d’automatique (constante de temps, temps de réponse à 5%,
amplitude du dépassement, harmonique : rapport des valeurs moyennes et des amplitudes, déphasages
etc?).
Important :
Le cœur logiciel D_CCA fonctionne en autonomie sans partie opérative et n’a pas de « Dungle ».
Ceci permet aux étudiants d’installer le logiciel sur leur PC personnel et de préparer leurs comptes-rendus de TPS faits eux en ligne avec les machines dans l’établissement.
Une version d’évaluation gratuite D_CCA_Eval de notre logiciel D_CCA (Contrôle Commande dans le domaine de l’Automatique) est téléchargeable sur notre site. Celle-ci permet au lecteur de découvrir tout le potentiel pédagogique de D_CCA.
Pour accéder à la page de spécifications d’un laboratoire d’automatique niveau III à IV ou V à VII CITE 2011,  » Cliquez ici «
» Cliquez ici «
Documents disponibles
Produits associés et complémentaires


EP660000
Hacheur 1 à 4 quadrants, Onduleur monophasé & triphasé 1,5/3 kW.
Montage réalisable:
• Hacheur série, réversible en tension, en courant, 4 quadrants, double imbriqué 0+E0/0?E0,
• Onduleur monophasé, pleine onde, MLI, triphasé, pleine onde, à commande décalée, MLI +/-E, +E/0/-E,U/F constant monophasé ou triphasé, redressement MLI,
• Puissance de fonctionnement 1,5/3 kW.
Toutes les commandes hacheurs, onduleurs monophasés, triphasés sont disponibles en mode MLI intersectives ou à vecteurs d’état (spatial).
Il est intègre des sondes de courant dans chaque branche et est équipé d’un haut niveau de sécurité (protection électronique contre les courts-circuits, rupture d’excitation, verrouillage de la tension de sortie…)
Les sondes de courant et de tension sont intégrées dans les branches du montage de puissance et permettent une visualisation aisée et sécurisée de ces variables sur l’écran du module ou sur oscilloscope via 4 BNC.
En option, deux modules logiciels sont proposés :
étude de la commande d’asservissement sur moteurs AC ou DC
Module de prototypage rapide sous Scilab/Xcos.

ERD050000 : IAPV
Étude des asservissements de vitesse et position d’un moteur CC.
Correcteurs analogiques et numériques.
• Choix de la structure : en boucle ouverte, en boucle fermée en vitesse, en position.
• Choix du type d’excitation : échelon constant, rampe, trapèze, sinusoïde, suivi de consigne interne (potentiomètre) ou externe.
• Choix de l’interface de puissance alimentant le moteur : commande en tension ou en courant.
• Choix du correcteur : P/PD/PI/PID , TOR , Numérique (échantillonné avec fonction de correction en Z en option).
• Choix de l’entrée sur laquelle est appliquée l’action dérivée : sur l’écart, sur la mesure,
• Choix du profil de la charge mécanique entraînée : constante (charge pesante), fonction de la vitesse (frottement visqueux, frottement fluide), frottement sec intrinsèque compensé ou non.

ERD552000 : Système d’étude d’une régulation de niveau et de débit d’eau, à 1 ou 2 colonnes, avec retard pur.
Les capteurs de niveau et de débit sont de type industriel et sont directement interfacés en boucle de courant 4/20 mA.
Le système de commande intégré permet l’étude des correcteurs P, I, D, Transformée en Z, logique floue, compensation de temps mort etc..
En option :
Module de prototypage rapide sous Scilab/XCOS.


EP560000
Hacheur 1 à 4 Q, onduleur monophasé 1,5/3 kW.
Montage réalisable:
• série, réversible en courant, en tension, 4 quadrants, onduleur pleine onde, MLI +/-E, +/0/-E, U/F constant.
• Onduleur monophasé, pleine onde, MLI.
• Puissance de fonctionnement 1,5/3 kW.
Il est intègre des sondes de courant dans chaque branche et est équipé d’un haut niveau de sécurité (protection électronique contre les courts-circuits, rupture d’excitation, verrouillage de la tension de sortie…)
Les sondes de courant et de tension sont intégrées dans les branches du montage de puissance et permettent une visualisation aisée et sécurisée de ces variables sur l’écran du module ou sur oscilloscope via 4 BNC.
En option, deux modules logiciels sont proposés :
étude de la commande d’asservissement sur moteurs AC ou DC
Module de prototypage rapide sous Scilab/Xcos?.

ERD560000 : Système d’étude d’une régulation simple débit pression d’air.
Chambre 1000 cm3, constante de temps 14,5s du premier ordre.
Le capteur de pression est de type industriel et directement interfacé en boucle de courant 4/20 mA,
un afficheur graphique permet la visualisation de la variable pression.
Associé au logiciel ERD 560 100,
l’étude des correcteurs P, I, D, Transformée en Z, logique floue, compensation de temps mort, élaboration de nouveaux correcteurs.

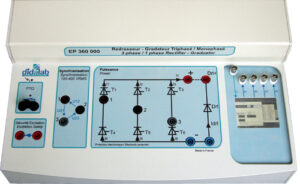
EP360000
Pont de Graëtz monophasé triphasé, gradateur, onduleur assisté 1,5/3 kW.
Montage réalisable:
• Redresseurs triphasé / monophasés : à diodes, Mixte symétrique / asymétrique, Tout thyristor,
• Gradateur triphasé / monophasé, mixte / tout thyristor,
• Onduleur assisté.
• Gradateur aval.
Il est intègre des sondes de courant dans chaque branche et est équipé d’un haut niveau de sécurité (protection électronique contre les courts-circuits, rupture d’excitation, verrouillage de la tension de sortie…)
Les sondes de courant et de tension sont intégrées dans les branches du montage de puissance et permettent une visualisation aisée et sécurisée de ces variables sur l’écran du module ou sur oscilloscope via 4 BNC.
En option, deux modules logiciels sont proposés :
étude de la commande d’asservissement sur moteurs AC ou DC
Module de prototypage rapide sous Scilab/Xcos.

ERD150000 : Axnum Système asservi d’axe industriel de machine outils à crémaillère et moteur CC.
Correcteurs analogiques et numériques.
• Choix de la structure en boucle ouverte, en boucle fermée en vitesse, en position.
• Choix du type d’excitation : échelon constant, rampe, trapèze, sinusoïde, suivi de consigne interne (potentiomètre) ou externe.
• Choix de l’interface de puissance alimentant le moteur : commande en tension ou en courant.
• Choix du correcteur : P/PD/PI/PID , TOR , Numérique,échantillonné, correction en Z,
• Choix de l’entrée sur laquelle est appliquée l’action dérivée : sur l’écart, sur la mesure,
En option :
Module de prototypage rapide sous Scilab/XCOS.

ERD100000 : Synum
Étude des asservissements de vitesse et position d’un moteur CC.
Correcteurs analogiques et numériques.
• Choix de la structure : en boucle ouverte, en boucle fermée en vitesse, en position.
• Choix du type d’excitation : échelon constant, rampe, trapèze, sinusoïde, suivi de consigne interne (potentiomètre) ou externe.
• Choix de l’interface de puissance alimentant le moteur : commande en tension ou en courant.
• Choix du correcteur : P/PD/PI/PID , TOR , Numérique,échantillonné, correction en Z,
• Choix de l’entrée sur laquelle est appliquée l’action dérivée : sur l?écart, sur la mesure,
En option :
Module de prototypage rapide sous Scilab/XCOS.