




Carte d’étude du microprocesseur microcontroleur 68332
EID210000 Carte d’étude du microprocesseur microcontrôleur 68332 et ses périphériques.
(RS232, USB, SPI, I2C, parallèle, TPU, convertisseurs Analogiques Numériques et Numériques analogiques… )
Caractéristiques techniques :
Matériel :
- Architecture d’un micro-système 16/32 bits à base d’un microprocesseur, micro-contrôleur 68332 cadencé à 16,7 MHz,
- RAM 128 Kmots de 16 bits,
- ROM 128 KOctets
- flashs ?,
- Ports série USB, RS232, SPI, I2C,
- Bus PC104 donnant accès à un très grand nombre de cartes d’entrées sorties disponibles,
- Port // 24 bits,
- 6E et 4 S Analogiques.
Logiciel :
- éditeur sur PC,
- cross assembleur,
- Moniteur debugger, pose de points d’arrêt, visualisation des registres, d’une zone mémoire…
- Cross compilateur C et C
++
, GNU avec les bibliothèques StDIO (Standard Data Input Output), String (gestion des chaînes de caractères), Math (calcul flottant), bibliothèque de fonctions bas niveau (gestion des interruptions, du port USB et RS232?) fournie, linkeur configuré spécifiquement pour la carte EID 210 000.
Simulateur d’entrées sorties EID001000 :
Afin de mettre en évidence les entrées sorties d’un micro système et de faciliter les premiers pas en étude et programmation, un simulateur d’entrée sortie est fourni, il comprend :
- Entrées TOR (micro-système) 8 microswitchs,
- Sorties TOR (micro-système) 8 LED,
- Entrée analogique (micro-système) 1 potentiomètre,
- Sortie analogique (micro-système) 1 LED avec point de test,
- 1 Afficheur 7 segments,
- 1 poussoir traité anti-rebond pour la mise en œuvre des interruptions
Pour accéder à la page de spécifications d’un laboratoire d’informatique industrielle niveau III à IV ou V à VII CITE 2011,  » Cliquez ici «
» Cliquez ici «
Documents disponibles
Produits associés et complémentaires

VMD01C
Projet BUS CAN 2/2.
Le Véhicule Multiplexé Didactique est l’outil idéal pour mettre l’étudiant en situation de développeur en bureau d’étude.
Le système est composé d’un ordinateur de bord à base de micro-contrôleur 68332, une carte interface CAN industrielle, une carte CAN 8 entrées TOR et 4 cartes CAN 4 sorties de puissances, un ensemble pare-brise avec régulation de vitesse du moteur via réseau CAN, un noyau temps réel.
Un compilateur C et C++ et de nombreux travaux pratiques sont fournis avec le matériel.
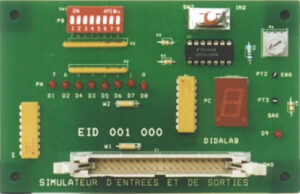
EID001000
Simulateur d’entrées sorties.
Permet la mise en œuvre de programmes utilisant des entrées sorties TOR, analogiques et interruptions.
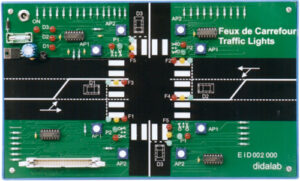
EID002000
Partie opérative de simulation de feux de carrefour.
Elle est pilotable par les cartes cibles des séries EID 110/210….
Elle représente une intersection voie à grande circulation avec voie secondaire, appels piétons et détection de présence voiture.

EID210200
Noyau temps réel dynamique pour la carte cible à base de microcontrôleur 68332.
Permet la mise en œuvre d’un noyau temps réel sur système embarqué EID210000.

VMD01B
Projet Bus CAN 1/2.
Le Véhicule Multiplexé Didactique est l’outil idéal pour mettre l’étudiant en situation de développeur en bureau d’étude.
Le système est composé d’un ordinateur de bord à base de micro-contrôleur 68332, une carte interface CAN industrielle, une carte CAN 8 entrées TOR et 4 cartes CAN 4 sorties de puissance.
Un compilateur C et C++ et de nombreux travaux pratiques sont fournis avec le matériel.

CAN01A
Ensemble d’étude des Réseaux Locaux Industriels appliqués à l’automobile.
Associé à une mère cible EID11000, EID210000 ou un PC, le module CAN, est un projet complet de développement de gestion d’un système de signalisation d’une voiture.
La programmation se fait en assembleur, C, C++, un noyau temps réel est disponible.
CAN01B
Pack d’étude d’une régulation de vitesse de moteur (essuie glace) via réseau RLI CAN.
Associé à une carte cible EID11000, EID210000 ou un PC, le module CAN01B, est un projet complet de développement de gestion d’un système de régulation de vitesse d’un moteur, la lecture vitesse est assurée par un codeur incrémental.
La programmation se fait en assembleur, C, C++, un noyau temps réel est disponible.