




D_Scil, GENERATEUR DE CORRECTEURS TEMPS REELS
D_Scil est un outil de prototypage rapide destiné à l’automatique, il génère du code C temps réel à partir d’un éditeur graphique.
Le code C généré est directement exécutable sur un grand nombre d’équipements pédagogiques Didalab GE d’asservissement, de régulation ou d’uélectronique de puissance.
Il fonctionne sous, environnement SCILAB/XCOS « simulation de systèmes dynamiques hybrides ».
Quelques exemples de nouveaux correcteurs qui peuvent être synthétisés :
• Retour d’état,
• Modéle interne,
• RST…
Caractéristiques techniques :
D_Scil est un module logiciel qui permet de générer le code source « c » d’un bloc fonctionnel défini et simulé sous Scilab/Xcos et de réaliser son intégration dans le logiciel de contrôle commande D_CCA.
Systèmes cibles supportés :
Ce code C généré est directement exécutable sur les équipements pédagogiques d’asservissement et de régulation :
• ERD050, Initiation aux asservissements de vitesse & position,
• ERD100, Asservissement analogique et Numérique de vitesse et position,
• ERD150, Axe Numérique asservi,
• ERD540, Régulation de débit et température d’air,
• ERD550, Régulation de débit et niveau d’eau,
• ERD560, Régulation de pression d’air,
• EP360, Pont redresseur monphasé triphasé à thyristors, 1.5 kW
• EP560, Pont hacheur onduleur monophasé, 1.5 kW
• EP660, Pont hacheur, onduleur monophasé, triphasé MLI, pleine onde, 1.5 kW.
• EP(S)130, Pont redresseur monphasé triphasé à thyristors, 300 W
• EP(S)210, Pont hacheur onduleur monophasé, 300 W
• EP(S)230, Pont hacheur, onduleur monophasé, triphasé MLI, pleine onde, 300 W.
Il fonctionne sous environnement SCILAB/XCOS qui est un outil de simulation de systèmes dynamiques hybrides.
Le processus de développement consiste à :
• Expérimenter le système afin de déterminer son modèle théorique (shéma-blocs),
• Effectuer une simulation sous Scilab/Xcos pour vérifier le modèle,
• Rechercher le correcteur adapté et ses réglages (c?est le bloc fonctionnel à synthétiser),
• Simuler ce processus corrigé sous Scilab/Xcos, intégrant le bloc fonctionnel à synthétiser,
• Générer automatiquement le programme C correspondant au correcteur et ses réglages,
• Télécharger ce programme dans la maquette cible (ERD100…)
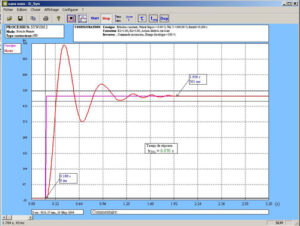
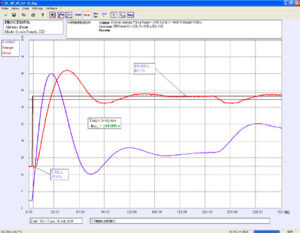
• Tester le comportement du système asservi avec le correcteur téléchargé,
• Comparer les résultats de simulation et d’expérimentation.
Quelques exemples de nouveaux correcteurs :
• Retour d’état,
• Modéle interne,
• RST…
Vidéos de démonstration
Produits associés et complémentaires

ERD150000 : Axnum Système asservi d’axe industriel de machine outils à crémaillère et moteur CC.
Correcteurs analogiques et numériques.
• Choix de la structure en boucle ouverte, en boucle fermée en vitesse, en position.
• Choix du type d’excitation : échelon constant, rampe, trapèze, sinusoïde, suivi de consigne interne (potentiomètre) ou externe.
• Choix de l’interface de puissance alimentant le moteur : commande en tension ou en courant.
• Choix du correcteur : P/PD/PI/PID , TOR , Numérique,échantillonné, correction en Z,
• Choix de l’entrée sur laquelle est appliquée l’action dérivée : sur l’écart, sur la mesure,
En option :
Module de prototypage rapide sous Scilab/XCOS.

ERD552000 : Système d’étude d’une régulation de niveau et de débit d’eau, à 1 ou 2 colonnes, avec retard pur.
Les capteurs de niveau et de débit sont de type industriel et sont directement interfacés en boucle de courant 4/20 mA.
Le système de commande intégré permet l’étude des correcteurs P, I, D, Transformée en Z, logique floue, compensation de temps mort etc..
En option :
Module de prototypage rapide sous Scilab/XCOS.

ERD551000 : Système d’étude d’une régulation de débit et niveau d’eau, à 1 colonne, avec retard pur.
Les capteurs de niveau et de débit sont de type industriel et sont directement interfacés en boucle de courant 4/20 mA.
Le système de commande intégré permet l’étude des correcteurs P, I, D, Transformée en Z, logique floue, compensation de temps mort etc..
En option :
Module de prototypage rapide sous Scilab/XCOS.

ERD100000 : Synum
Étude des asservissements de vitesse et position d’un moteur CC.
Correcteurs analogiques et numériques.
• Choix de la structure : en boucle ouverte, en boucle fermée en vitesse, en position.
• Choix du type d’excitation : échelon constant, rampe, trapèze, sinusoïde, suivi de consigne interne (potentiomètre) ou externe.
• Choix de l’interface de puissance alimentant le moteur : commande en tension ou en courant.
• Choix du correcteur : P/PD/PI/PID , TOR , Numérique,échantillonné, correction en Z,
• Choix de l’entrée sur laquelle est appliquée l’action dérivée : sur l?écart, sur la mesure,
En option :
Module de prototypage rapide sous Scilab/XCOS.

