



Etude des asservissements analogiques et numériques de vitesse et position
ERD050000 : IAPV
Étude des asservissements de vitesse et position d’un moteur CC.
Correcteurs analogiques et numériques.
• Choix de la structure : en boucle ouverte, en boucle fermée en vitesse, en position.
• Choix du type d’excitation : échelon constant, rampe, trapèze, sinusoïde, suivi de consigne interne (potentiomètre) ou externe.
• Choix de l’interface de puissance alimentant le moteur : commande en tension ou en courant.
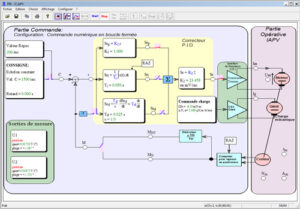
• Choix du correcteur : P/PD/PI/PID , TOR , Numérique (échantillonné avec fonction de correction en Z en option).
• Choix de l’entrée sur laquelle est appliquée l’action dérivée : sur l’écart, sur la mesure,
• Choix du profil de la charge mécanique entraînée : constante (charge pesante), fonction de la vitesse (frottement visqueux, frottement fluide), frottement sec intrinsèque compensé ou non.
L’ ERD 050 000 est un ensemble électromécanique intégré dans un coffret en PVC.
Dans ce boîtier est implanté un dispositif mécanique comprenant :
• un moteur CC 24 Vdc (pour les caractéristiques voir tableau ci-dessous),
• une génératrice à CC accouplée au moteur par joint de OLDHAM permet la génération de charges mécaniques diverses,
• un disque gradué visualise la position et le comportement de l’ensemble en rotation,
• une carte électronique de commande avec microprocesseur de haut niveau de puissance assure le contrôle en temps réel du système et la communication à un micro-ordinateur de type PC (liaison USB),
• une carte électronique de puissance réalise l’interface de puissance pour l’alimentation du moteur ainsi que l’interface pour la génératrice (simulatrice de charges mécaniques diverses),
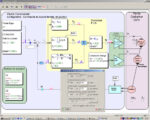
Un logiciel sous Windows permet de choisir :
• la structure du système : boucle ouverte / boucle fermée, en vitesse ou en position,
• le type de commande et les valeurs caractéristiques : échelon constant, rampe, sinus, trapèze, externe,
• le correcteur : P, PI, PD, PID avec réglage des paramètres, (en option correcteur en Z d’ordre 4),
• le profil de charge mécanique : couple constante (charge pesante), frottement visqueux (en a.x), frottement fluide(en b.x2)
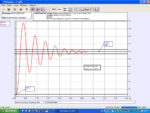
• la visualisation de la réponse temporelle d’une (ou plusieurs) grandeur(s) caractéristique(s) : position, vitesse, accélération, courant moteur, tension moteur, consigne, écart, sortie correcteur etc
• l’assistance à la mesure des grandeurs typiques d’automatique, constante de temps, dépassement, stabilisation à 5%, calcul harmonique, sinusoïdal.
Une version d’évaluation gratuite D_CCA_Eval de notre logiciel D_CCA (Contrôle Commande dans le domaine de l’Automatique) est téléchargeable sur notre site. Celle-ci permet au lecteur de découvrir tout le potentiel pédagogique de D_CCA.
Pour accéder à la page de spécifications d’un laboratoire d’automatique niveau III à IV ou V à VII CITE 2011,  » Cliquez ici «
» Cliquez ici «
Documents disponibles
Produits associés et complémentaires

ERD100000 : Synum
Étude des asservissements de vitesse et position d’un moteur CC.
Correcteurs analogiques et numériques.
• Choix de la structure : en boucle ouverte, en boucle fermée en vitesse, en position.
• Choix du type d’excitation : échelon constant, rampe, trapèze, sinusoïde, suivi de consigne interne (potentiomètre) ou externe.
• Choix de l’interface de puissance alimentant le moteur : commande en tension ou en courant.
• Choix du correcteur : P/PD/PI/PID , TOR , Numérique,échantillonné, correction en Z,
• Choix de l’entrée sur laquelle est appliquée l’action dérivée : sur l?écart, sur la mesure,
En option :
Module de prototypage rapide sous Scilab/XCOS.
Logiciel de pilotage pour le module ERD 050 000

Manuel de Travaux Pratiques asservissement/régulation de vitesse et position dans le domaine linéaire, niveau BAC+ 2, tome sujets, 10 TP accompagnés d’un dossier ressources, 84 pages.

Manuel de Travaux Pratiques asservissement/régulation de vitesse et position dans le domaine linéaire, niveau BAC, tome sujets, 5 TP acompagnés d’un dossier ressource, 42 pages.

Manuel de Travaux Pratiques asservissement/régulation de vitesse et position dans le domaine numérique, échantillonés ou discrets, tome sujets, 7 TP accompagnés d’un dossier ressources, 84 pages.